II. 3D-C-assisted navigation surgery-FESS-of the nose, and paranasal sinuses, with the use of computer assisted (CA)-RP (rapid prototyping) models (3D-CA-RP-FESS)
Dg. Rhinosinuitis chronica. Aspergiloma sinus maxillaris lateris sinistri. Fractura multip. septi nasi cum deviationem septi palatinalis lateris dextri (lamina qvadrangularis ar II-III et perpendicularis ar III-V). Hypertrophia conharum nasalis inferioris nasi bilateralis.
Operacija: Operatio sinus paranasales per viam 3D-CA-RP-FESS. Operatio septi nasi functionalis cum reconstructionem septi ar II-V. Turbinotomia conharum nasalis inferioris bilateralis (diminuitio mucosae conharum nasales inferior bilateralis).
Different VR applications become a routine preoperative procedure in human medicine, as we already shown in our surgical activities in the last two decades (from June 03, 1994), providing a highly useful and informative visualization of the regions of interest, thus bringing advancement in defining the geometric information on anatomical contours of 3D-human head-models by the transfer of so-called "image pixels" to "contour pixels". The purpose of a tele-presence system is to create a sense of physical presence at a remote location. Tele-presence is achieved by generating sensory stimulus so that the operator has an illusion of being present at a location distant from the location of physical presence. A tele-presence system extends operator's sensory-motor facilities and problem solving abilities to a remote environment. A tele-operation system enables operation at a distant remote site by providing the local operator with necessary sensory information to simulate operator's presence at the remote location. Tele-operation is a special case of tele-presence where in addition to illusion of presence at a remote location operator also has the ability to perform certain actions or manipulations at the remote site. In this way it is possible to perform various actions in distance locations, where it is not possible to go due to a danger, prohibitive price, or a large distance. Realization of VR systems require software (design of VE) for running VR applications in real-time. Simulations in real-time require powerful computers that can perform real-time computations required for generation of visual displays. Different goals can be achieved by using different VR applications. These goals range from teaching, diagnosis, intervention planning, providing insight into the potentially complicated and non-standard anatomy, as well pathology of the patients, intra-operative navigation, etc. VE or fly-through methods which combine the features of endoscopic viewing and cross-sectional volumetric imaging provided more effective and safer endoscopic procedures in diagnostics and management of our patients, especially preoperatively, as we already discussed. This approach can also be applied for training and familiarize the surgeon with endoscopic anatomic appearance. Definitely, the presentation of image data in such a way enables the operator not only to explore the inner wall surfaces but also to navigate inside the virtual organs extracted from MSCT and/or MR images of nasal cavity, paranasal sinuses and scull base, and in combination with in-space skull bone rendering, offers plastic and accurate additional 3D information for head and neck surgeon in combination with classical 2D black and white CT images.


Figure 1. Our 3D models of the human head in different projections. Virtual reality systems may be used for visualization of anatomical structures, virtual endoscopy, 3D-image-guided surgery as well as of pathology and/or anatomy during the planning of therapy. Once created from 2D-CT/MRI cross-section images with 3D modelling SW, virtual 3D surface models or VR models can be further used in VR for measuring, operation planning, simulations and structural finite element analysis (FEA).
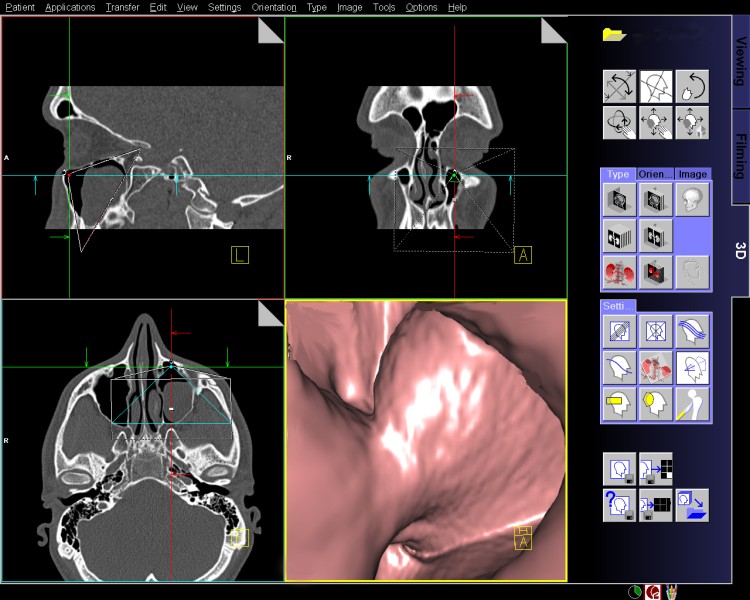
Figure 2. We performed VE of paranasal sinuses, and nasal cavity, as a part of diagnostic or preoperative management.